文章目录
- 1 深度网络
- 2 经验回放
- 3 目标网格
- 4 实战
- 4.1 伪代码
- 4.1.1 伪代码解释
- 4.2 定义模型
- 5 Double DQN算法
- 6 Dueling DQN 算法
- 7 Noisy DQN
- 8 PER DQN
- 9 C51算法
- 9.1 公式解析
- 9.1.1 含义
- 9.1.2 状态分布
- 9.2 直观理解
- 9.3 应用
深度强化学习
DQN 算法,英文全称 Deep Q-Network , 顾名思义,它的主要贡献就是在 Q-learning 算法的基础上引入了深度神经网络来近似动作价值函数 𝑄(𝑠,𝑎),从而能够处理高维的状态空间。
除了用深度网络代替 𝑄 表之外,DQN 算法还引入了一些技巧,如经验回放和目标网络。
1 深度网络
神经网络就是一个函数,只不过不同于一般的数值函数,它的输入输出都是向量,并且拥有可以学习的参数
θ
\theta
θ,这些参数可以通过梯度下降的方式来优化,从而使得神经网络能够逼近任意函数。
在 𝑄 表中我们描述状态空间的时候一般用的是状态个数,而在神经网络中我们用的是状态维度。。另外注意,无论是 𝑄 表还是 DQN 中的神经网络,它们输出的都是每个动作对应的 𝑄 值,即预测,而不是直接输出动作。要想输出动作,就需要额外做一些处理,例如结合贪心算法选择 𝑄 值最大对应的动作等,这就是我们一直强调的控制过程。
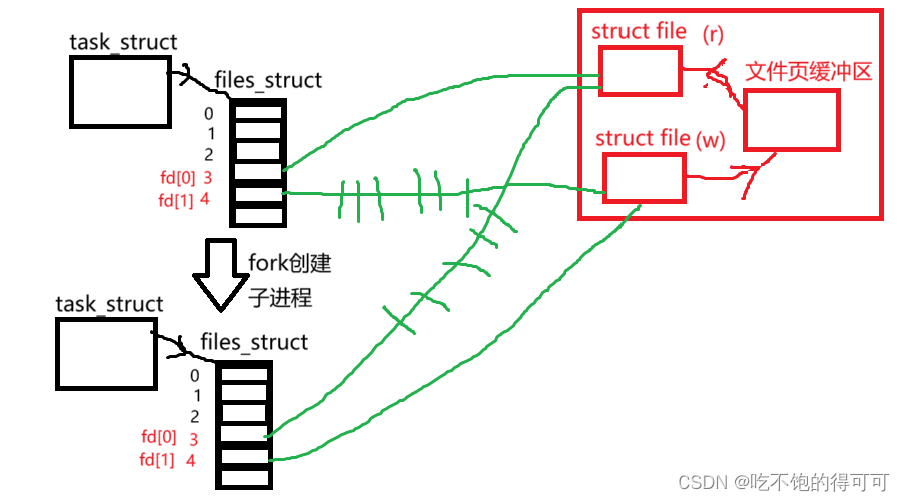
2 经验回放
引入一些技巧来提高训练的稳定性。
3 目标网格
每隔若干步才更新的目标网格。
4 实战
养成先写出伪代码再编程的习惯,这样更有助于提高对算法的理解。
4.1 伪代码
DQN 算法
- 初始化当前网络参数 θ \theta θ
- 复制参数到目标网络 θ ^ ← θ \hat{\theta} \leftarrow \theta θ^←θ
- 初始化经验回放库 D D D
- for 回合数
m
=
1
,
2
,
…
,
M
m = 1, 2, \ldots, M
m=1,2,…,M do
- 重置环境,获得初始状态 s 0 s_0 s0
- for 时步
t
=
1
,
2
,
…
,
T
t = 1, 2, \ldots, T
t=1,2,…,T do
- 动作选择:
- 根据 ϵ \epsilon ϵ-greedy 策略选择动作 a t a_t at
- 执行动作,反馈奖励 r t r_t rt 和下一个状态 s t + 1 s_{t+1} st+1
- 将样本 ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1) 存到经验回放库 D D D 中
- 更新状态 s t + 1 ← s t s_{t+1} \leftarrow s_t st+1←st
- 模型更新:
- 从 D D D 中随机采样一个批量的样本
- 计算 Q Q Q 的期望值,即 y i = r t + γ max a ′ Q ( s t + 1 , a ′ ; θ ^ ) y_i = r_t + \gamma \max_{a'} Q(s_{t+1}, a'; \hat{\theta}) yi=rt+γmaxa′Q(st+1,a′;θ^)
- 计算损失 L ( θ ) = E [ ( y i − Q ( s i , a i ; θ ) ) 2 ] L(\theta) = \mathbb{E}[(y_i - Q(s_i, a_i; \theta))^2] L(θ)=E[(yi−Q(si,ai;θ))2],并关于参数 θ \theta θ 做随机梯度下降
- 每 C C C 步复制参数到目标网络 θ ^ ← θ \hat{\theta} \leftarrow \theta θ^←θ
- 动作选择:
- end for
- end for
4.1.1 伪代码解释
-
初始化阶段:
- 初始化当前网络的参数 θ \theta θ。
- 复制参数到目标网络 θ ^ \hat{\theta} θ^,即 θ ^ ← θ \hat{\theta} \leftarrow \theta θ^←θ。
- 初始化经验回放库 D D D。
-
训练回合循环:
- 重置环境,获得初始状态 s 0 s_0 s0。
- 在每个时间步 t t t,根据 ϵ \epsilon ϵ-greedy 策略选择动作 a t a_t at,然后执行动作,获得奖励 r t r_t rt 和下一个状态 s t + 1 s_{t+1} st+1。
- 将样本 ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1) 存储到经验回放库 D D D 中。
- 更新状态 s t + 1 ← s t s_{t+1} \leftarrow s_t st+1←st。
-
模型更新:
- 从经验回放库 D D D 中随机采样一个批量的样本。
- 计算 Q Q Q 的期望值 y i = r t + γ max a ′ Q ( s t + 1 , a ′ ; θ ^ ) y_i = r_t + \gamma \max_{a'} Q(s_{t+1}, a'; \hat{\theta}) yi=rt+γmaxa′Q(st+1,a′;θ^)。
- 计算损失 L ( θ ) = E [ ( y i − Q ( s i , a i ; θ ) ) 2 ] L(\theta) = \mathbb{E}[(y_i - Q(s_i, a_i; \theta))^2] L(θ)=E[(yi−Q(si,ai;θ))2],并使用随机梯度下降法更新参数 θ \theta θ。
-
参数更新:
- 每 C C C 步将当前网络的参数复制到目标网络 θ ^ ← θ \hat{\theta} \leftarrow \theta θ^←θ。
通过以上步骤,DQN 算法能够在环境中学习并优化其策略。
4.2 定义模型
定义模型,就是定义两个神经网路,即当前网络和目标网络。
DQN算法为什么要进行改进?
| 模型 | 改进点 | 目标 | |
|---|---|---|---|
| Double DQN | 改进目标 𝑄 值的计算型层面 | 提高预测的精度 | 介于DQN 和Nature DQN之间 |
| Dueling DQN | 优化神经网络的结构 | 提高 𝑄 值的估计精度 | |
| Noisy DQN | 优化网络结构 | 增强网络的探索能力 | |
| PER DQN | 经验回放的角度 | 提高控制过程中的探索度 | |
| C51算法 | |||
| Rainbow DQN算法 | |||
5 Double DQN算法
Double DQN 算法中我们是通过改进目标 𝑄 值的计算来优化算法。
把动作选择和动作评估这两个过程分离开来,从而减轻了过估计问题。
6 Dueling DQN 算法
Dueling DQN 算法中则是通过优化神经网络的结构来优化算法。
在输出层之前分流(dueling)出了两个层,价值层和优势层。
优势层用于估计每个动作带来的优势,输出维度为动作数。
价值层用于估计每个状态的价值,输出维度为1。
7 Noisy DQN
探索-利用平衡的问题。
𝜀−greedy 策略是从智能体与环境的交互过程改善探索能力,以避免陷入局部最优解。
深度强化学习既要考虑与环境交互过程中的探索能力,也要考虑深度模型本身的探索能力,从而尽量避免陷入局部最优解的困境之中。
Noisy DQN 算法其实是在 DQN 算法基础上在神经网络中引入了噪声层来提高网络性能的,即将随机性应用到神经网络中的参数或者说权重,增加了 𝑄 网络对于状态和动作空间的探索能力,从而提高收敛速度和稳定性。
8 PER DQN
目标方法技术是一环套一环的,一个技术中又会有许多需要优化的地方。
目的:
方法:优化经验回放的设计提高模型的收敛能力和鲁棒性。
技术点:通过TD误差来为经验回放中的样本赋予不同优先级。
工具:SumTree二叉树结构。
优缺点:单纯根据 TD 误差进行优先采样有可能会错过对当前网络“信息量”更大的样本。其次,被选中样本的 TD 误差会在当前更新后下降,然后优先级会排到后面去,下次这些样本就不会被选中,这样来来回回都是那几个样本。
随机优先级采样 优化TD采样。
9 C51算法
核心思想:是将传统 DQN 算法中的值函数 𝑄(𝑠,𝑎) 换成了值分布 𝑍(𝑥,𝑎),即将值函数的输出从一个数值变成了一个分布,这样就能更好地处理值函数估计不准确以及离散动作空间的问题。
将值函数 𝑄 看成是一个随机变量,它的期望值就是 𝑄 函数,而它的方差就是 𝑄 函数的不确定性。
该公式是强化学习中的Q函数定义,它表示在给定状态和动作下的期望累计回报。以下是对公式的详细解释:
9.1 公式解析
Q π ( x , a ) : = E Z π ( x , a ) = E [ ∑ t = 0 ∞ γ t R ( x t , a t ) ] Q^\pi(x, a) := \mathbb{E}Z^\pi(x, a) = \mathbb{E} \left[ \sum_{t=0}^{\infty} \gamma^t R(x_t, a_t) \right] Qπ(x,a):=EZπ(x,a)=E[t=0∑∞γtR(xt,at)]
9.1.1 含义
- Q π ( x , a ) Q^\pi(x, a) Qπ(x,a): 在策略 π \pi π 下,从状态 x x x 执行动作 a a a 开始的状态-动作值函数。它表示在状态 x x x 采取动作 a a a 时,按照策略 π \pi π 继续行动所能获得的期望累计回报。
- E \mathbb{E} E: 期望值运算符,表示对未来的随机性取期望。
- Z π ( x , a ) Z^\pi(x, a) Zπ(x,a): 从状态 x x x 采取动作 a a a 开始,按照策略 π \pi π 的行为得到的回报序列的期望值。
- ∑ t = 0 ∞ γ t R ( x t , a t ) \sum_{t=0}^{\infty} \gamma^t R(x_t, a_t) ∑t=0∞γtR(xt,at): 累计回报。表示从时间步 t = 0 t=0 t=0 开始,未来各个时间步的奖励 R ( x t , a t ) R(x_t, a_t) R(xt,at) 按照折扣因子 γ \gamma γ 加权求和。
9.1.2 状态分布
公式下面的解释是描述状态 x t x_t xt 和动作 a t a_t at 的分布及其关系:
- x t ∼ P ( ⋅ ∣ x t − 1 , a t − 1 ) x_t \sim P(\cdot \mid x_{t-1}, a_{t-1}) xt∼P(⋅∣xt−1,at−1): 状态 x t x_t xt 根据先前状态 x t − 1 x_{t-1} xt−1 和动作 a t − 1 a_{t-1} at−1 通过状态转移概率分布 P P P 得到。
- a t ∼ π ( ⋅ ∣ x t ) a_t \sim \pi(\cdot \mid x_t) at∼π(⋅∣xt): 动作 a t a_t at 根据当前状态 x t x_t xt 和策略 π \pi π 得到。
- x 0 = x x_0 = x x0=x: 初始状态为 x x x。
- a 0 = a a_0 = a a0=a: 初始动作为 a a a。
9.2 直观理解
- Q函数:表示在特定状态下采取某个动作,并且以后按照某个策略行动所能获得的总奖励。这个值越高,意味着从这个状态采取这个动作是有利的。
- 期望:由于未来状态和奖励可能是随机的,所以计算期望值是为了得到一个平均的回报值。
- 折扣因子 γ \gamma γ:用于衡量未来奖励的重要性, γ ∈ [ 0 , 1 ) \gamma \in [0, 1) γ∈[0,1)。 γ \gamma γ 越接近1,表示未来奖励的重要性越高;越接近0,表示更关注短期奖励。
9.3 应用
这个公式是强化学习中Q学习、深度Q网络(DQN)等算法的基础,通过估计这个函数,智能体可以找到最佳策略,从而在给定环境中获得最大的累计回报。
总结来说,公式定义了在特定状态和动作下的期望累计回报,通过期望和折扣因子考虑了未来的所有可能性和长期收益。